Menü
Sprache
- German
- English
- Français
- Español
- Nederlands
- Português
- Русский
- Українська
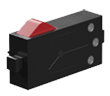
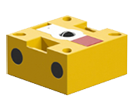
Der Taster ist ein digitaler Sensor, der "Es fließt Strom" von "Es fließt kein Strom" unterscheidet. Ob Strom fließt, hängt dabei sowohl von der Verkabelung, als auch davon ab, ob der Taster gedrückt ist. Man kann den Taster also auf zwei verschiedenen Arten verwenden:
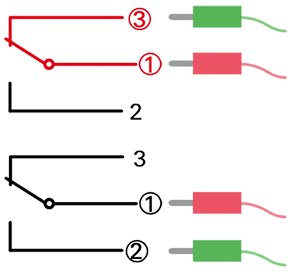
Als "Schließer":
Kontakte 1 und 3 werden angeschlossen.
Taster gedrückt: Es fließt Strom.
Taster nicht gedrückt: Es fließt kein Strom.
Kontakte 1 und 2 werden angeschlossen.
Taster gedrückt: Es fließt kein Strom.
Taster nicht gedrückt: Es fließt Strom.

Mit "hole Mini-Taster [] Status" erhält man Information darüber, ob durch den Taster Strom fließt oder nicht. Fließt Strom, wird 1 zurückgegeben, fließt kein Strom, 0.

Um abzufragen, ob der Taster in einem bestimmten Zustand ist, wird der Block "ist Taster [] []" genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, nach welchem Zustand gefragt wird. Dieser Block kann als Bedingung genutzt werden.
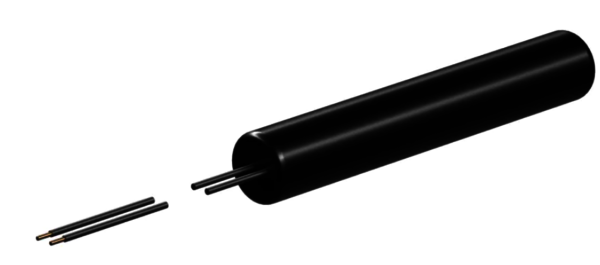
Der Reedkontakt ist ein magnetisch betätigter Schalter, der verwendet wird, um die Anwesenheit eines magnetischen Feldes zu erkennen. Der Kontakt schließt sich, wenn ein Magnet in der Nähe ist, und öffnet sich, wenn der Magnet entfernt wird.

Mit "hole Reedkontakt [] Status" erhält man Informationen darüber, ob der Reedkontakt geschlossen oder offen ist. Ist der Kontakt geschlossen, wird 1 zurückgegeben, ist er offen, 0.

Um abzufragen, ob der Reedkontakt in einem bestimmten Zustand ist, wird der Block "ist Reedkontakt [] []" genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, nach welchem Zustand gefragt wird. Dieser Block kann als Bedingung genutzt werden.

Der Gestensensor kombiniert Funktionen zur Erkennung von Handgesten, Farbmessung, Umgebungshelligkeit und Distanzmessung in einem Bauteil.

Der Block "Gestensensor [] [] []" ermöglicht das Ein- und Ausschalten spezifischer Funktionen des Gestensensors. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, ob das Licht, die Entfernungsmessung oder die Gestenerkennung aktiviert oder deaktiviert werden soll.

Der Block "hole Gestensensor [] []" ermöglicht es, viele verschiedene Daten vom Gestensensor abzurufen. Je nach Auswahl im Dropdown-Menü können folgende Informationen erhalten werden:

Der Block "ist Gestensensor [] [] [] ...", der als Bedingung dient, übernimmt folgende Funktionen:
RGB-Werte (Rot, Grün, Blau): Mit der Auswahl einer RGB-Farbe ermöglicht der Block "ist Gestensensor" das Reagieren auf spezifische Farbwerte. Im Dropdown-Menü kann ausgewählt werden, ob Rot-, Grün- oder Blauwerte abgefragt werden. Vergleichsoperatoren (<, ≤, =, ≠, ≥, >) und ein Wert im Zahlenfeld legen fest, ob die Bedingung erfüllt ist, z.B. um bei einem bestimmten Farbwert einen Motor zu stoppen oder eine andere Aktion auszulösen.
HSV-Werte (Hue, Saturation, Value): Mit der Auswahl einer HSV-Eigenschaft bietet der Block eine alternative Methode zur Farberkennung, die oft für präzisere Farberkennung verwendet wird. Über das Dropdown-Menü kann der Hue-, Saturation- oder Value-Wert eingestellt und verglichen werden, was eine feinere Steuerung ermöglicht.
Umgebungslicht: Mit der Auswahl von "Umgebungslicht" im Block "ist Gestensensor" kann das allgemeine Lichtniveau gemessen werden. Diese Funktion kann programmatisch genutzt werden, um bei geringer Beleuchtung automatisch Aktionen wie das Ausschalten eines Motors zu veranlassen.
Entfernung: Durch die Auswahl von "Entfernung" kann bestimmt werden, wie weit ein Objekt entfernt ist. Über das Dropdown-Menü und das Zahlenfeld lassen sich spezifische Abstände einstellen, bei denen das Programm reagieren soll, etwa durch das Anhalten oder Starten von Bewegungen.
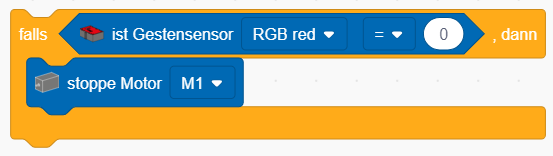
Das folgende Beispiel zeigt, wie der Block "ist Gestensensor" verwendet wird, um auf einen spezifischen Zustand zu reagieren. Im dargestellten Fall wird geprüft, ob der Rotwert (RGB red) des Gestensensors gleich 0 ist. Ist diese Bedingung erfüllt, führt das Programm eine Aktion aus - hier das Stoppen eines Motors.

Der Block „ist Gestensensor Farbe []“ dient als Bedingung und prüft, ob die ausgewählte Farbe erkannt wurde. Mögliche Farbwerte sind: rot, gelb, grün, blau, schwarz und unbekannt.
Das folgende Beispiel zeigt, wie der Block „ist Gestensensor Farbe“ eingesetzt wird, um auf einen bestimmten Sensorzustand zu reagieren. Im dargestellten Fall wird geprüft, ob die Farbe rot erkannt wird. Ist diese Bedingung erfüllt, führt das Programm eine entsprechende Aktion aus – hier das Stoppen eines Motors.


Der Widerstand des Fotowiderstands sinkt, wenn er mehr Helligkeit ausgesetzt ist. Der ausgegebene Wert des Fotowiderstands ist also ein Maß für Helligkeit.

Mit "hole Fotowiderstand [] Wert" erhält man die Information, wie hell es ist. Je kleiner der ausgegebene Wert, desto heller ist es.

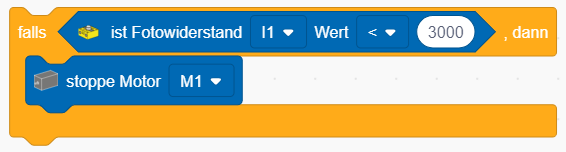
Um abzufragen, ob der Fotoresistor einen bestimmten Helligkeitswert misst, wird der Block "ist Fotowiderstand [] Wert [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt, wie der Helligkeitswert mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der Helligkeitswert kleiner als 3000 ist.

Der Ultraschallsensor wird genutzt, um Entfernungen zu messen.

Mit "hole Ultraschallsensor [] Abstand" erhält man die Information, wie weit der Sensor vom nächsten Gegenstand entfernt ist. Der Abstand wird in cm zurückgegeben.

Um abzufragen, ob der Sensor einen bestimmten Abstand zum nächsten Gegenstand hat, wird der Block "ist Ultraschallsensor [] Abstand [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, wie der gemessene Abstand mit einem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der gemessene Abstand kleiner als 2 cm ist.

Der Farbsensor sendet rotes Licht aus und misst, wie viel davon zurück reflektiert wird. Je nachdem, wie stark die Reflexion ist, gibt der Farbsensor Werte von 0 bis 2000 zurück. Er eignet sich gut, um vorher kalibrierte Farben zu erkennen.

Mit "hole Farbsensor [] Wert" erhält man die Information, wie stark eine Oberfläche das Licht reflektiert.

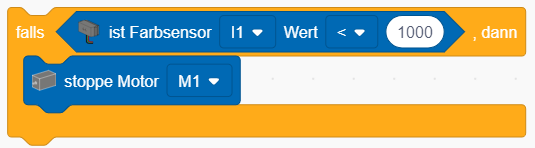
Um abzufragen, ob der Sensor eine bestimmte Farbe vor sich hat, wird der Block "ist Farbsensor [] Wert [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, wie der gemessene Farbwert mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der gemessene Farbwert kleiner als 1000 ist.

Der Infrarot-Spursensor ist ein digitaler Sensor zur Erkennung einer schwarzen Spur auf weißem Untergrund, der bei einem Abstand von 5 bis 30 mm von Sensor zu Untergrund arbeitet.

Mit "hole IR-Spursensor [] Status" erhält man 0, wenn der Sensor keine Spur erkennt. Erkennt der Sensor eine Spur, wird 1 zurückgegeben.

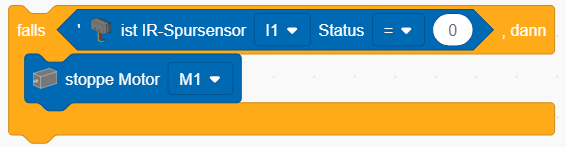
Um abzufragen, ob der IR-Spursensor eine Spur erkennt, vergleicht man den aktuellen Spurstatus mit 0 oder 1. Hierzu eignet sich der Block "ist IR-Spursensor [] Status [] ..." Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, wie der Spurstatus mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der Spurstatus 0 ist.
Der Fototransistor ist ein digitaler Sensor, der hell von dunkel unterscheidet.
Mit "hole Fototransistor [] Status" erhält man 0, wenn der Sensor kein Licht erkennt. Erkennt der Sensor ausreichend Licht, wird "1" zurückgegeben.
Um abzufragen, ob der Fototransistor hell oder dunkel erkennt, vergleicht man den Helligkeitsstatus mit 0 oder 1. Hierzu eignet sich der Block "ist Fototransistor [] Status []". Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt werden, ob hell oder dunkel abgefragt werden soll.
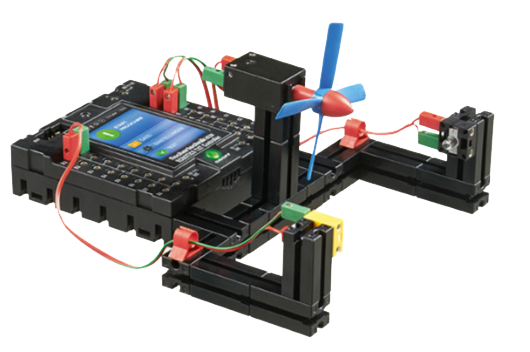
Eine mögliche Verwendung für einen Fototransistor ist in einer Lichtschranke, wie diesem Modell.
Der NTC-Widerstand ist ein nichtbinärer Temperatursensor. Sein elektrischer Widerstand sinkt, wenn die Temperatur steigt, und ist damit ein Maß für die Temperatur.

Mit "hole NTC-Widerstand []" erhält man entweder einen Widerstandswert oder die daraus errechnete Temperatur. Was zurückgegeben werden soll, kann über das Dropdown-Menü (kleines Dreieck) gewählt werden.

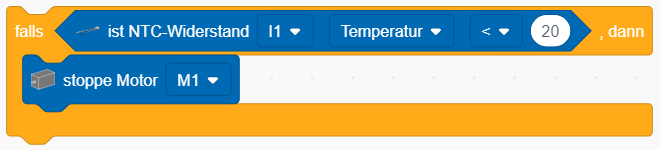
Um abzufragen, ob der NTC-Widerstand einen bestimmten Wert misst, wird der Block "ist NTC-Widerstand [] [] [] ..." genutzt. Über die Dropdown-Menüs (kleines Dreieck) kann gewählt werden, was und mit welchem Vergleichsoperator verglichen werden soll. Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Temperatur kleiner als 20 ist.

Der Umweltsensor vereint die vier Funktionen Luftqualitätssensor, Luftfeuchtigkeitssensor, Barometer und Thermometer in einem Bauteil.

Mit dem Block "hole Umweltsensor [] Luftfeuchtigkeit" kann man die Luftfeuchtigkeit messen.

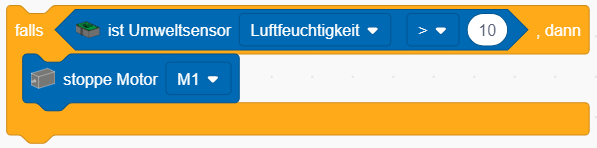
Um abzufragen, ob man eine bestimmte Luftfeuchtigkeit misst, wird der Block "ist Umweltsensor [] Luftfeuchtigkeit [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt, wie die Luftfeuchtigkeit mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Luftfeuchtigkeit größer als 10 ist.

Mit dem Block "hole Umweltsensor [] Luftqualität als []" kann man die Luftqualität messen. Über das Dropdown-Menü (kleines Dreieck) kann gewählt werden, ob die Luftqualität als Zahlenwert (von 0 bis 500) oder als Text zurückgegeben werden soll.

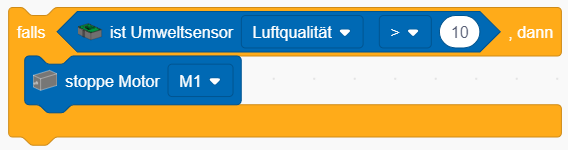
Um abzufragen, ob man eine bestimmte Luftqualität misst, wird der Block "ist Umweltsensor [] Luftqualität [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt, wie die Luftqualität mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Luftqualität größer als 10 ist.

Mit dem Block "hole Umweltsensor [] Luftdruck" kann man den Luftdruck messen.

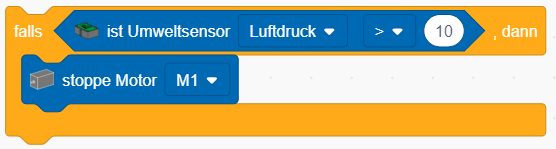
Um abzufragen, ob man einen bestimmten Luftdruck misst, wird der Block "ist Umweltsensor [] Luftdruck [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt, wie der Luftdruck mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der Luftdruck größer als 10 ist.

Mit dem Block "hole Umweltsensor [] Temperatur" kann man die Temperatur messen.

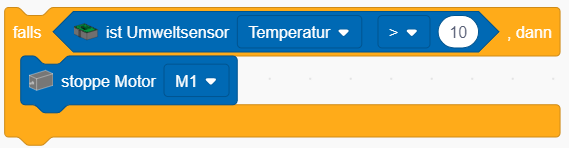
Um abzufragen, ob man eine bestimmte Temperatur misst, wird der Block "ist Umweltsensor [] Temperatur [] ..." genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt, wie die Temperatur mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Temperatur größer als 10 ist.

Der Block "hole Umweltsensor [] Genauigkeit" ermöglicht das Abrufen der Genauigkeitsstufe der Luftqualitätsmessung des Umweltsensors. Die Genauigkeit wird auf einer Skala von 0 bis 3 bewertet, wobei jede Zahl eine spezifische Bedeutung hat:
In dem Beispiel wird, wenn die Genauigkeit der vom Umweltsensor gemessenen Daten gleich 3 ist, d.h. der Sensor stabilisiert ist, eine Aktion ausgelöst.

Der Block "ist Kalibrierung von Umweltsensor [] erforderlich" dient spezifisch dazu, zu prüfen, ob die Genauigkeit des Umweltsensors den Wert 1 erreicht hat, was anzeigt, dass eine Kalibrierung erforderlich ist.
Der Block "kalibriere Umweltsensor []" startet den Kalibrierungsprozess des Sensors. Dieser Vorgang soll die Genauigkeit des Sensors verbessern und sicherstellen, dass die gemessenen Umweltdaten verlässlich sind.