Le démarrage de chaque bloc
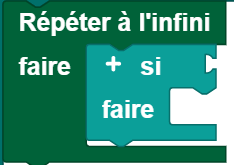
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
On peut insérer dans le démarrage chaque bloc de la catégorie Moteur toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Moteur
Le symbole figurant sur les blocs moteurs représente tous les moteurs autres que les codeurs ou les servomoteurs.
Configurer
Le bloc Définir la vitesse moteur à [] ... permet de fixer la vitesse d’un moteur à une valeur donnée (de 0 à 512). Le menu déroulant (petit triangle) permet de choisir le sens de rotation.
Afficher
Le bloc Récupérer la vitesse du moteur permet de consulter la vitesse d'un moteur et de la traiter comme une valeur.
Interroger
Avec les blocs Fonctionnement du moteur et Vitesse du moteur ... il est possible d’utiliser l’activité ou la vitesse d'un moteur comme condition.
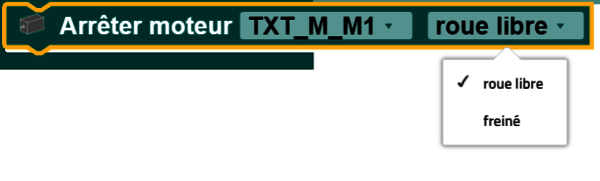
Arrêter
Le bloc Arrêt moteur … permet d’arrêter un moteur. Le bloc Arrêt moteur [] permet d’arrêter un moteur directement ou à échéance. L’option souhaitée peut être sélectionnée dans le menu déroulant (petit triangle).
Moteur encodeur

Le moteur encodeur a les mêmes fonctions qu’un moteur normal, mais il permet en outre de compter les rotations et de faire fonctionner plusieurs moteurs de façon synchronisée. Un tour est divisé en ~64 pas.
Configurer
Avec le bloc

il est possible de définir la vitesse d'un moteur sur une valeur spécifique (de 0 à 512). Le menu déroulant (petit triangle) permet de choisir le sens de rotation. On peut également saisir le nombre de pas que le moteur doit parcourir. Dans cet exemple, le moteur tourne à 100 pas, soit un et un tiers de tour. Comme on peut le voir par exemple, ce bloc a un signe plus permettant de faire fonctionner plusieurs moteurs de façon synchronisée. Il est possible de synchroniser les moteurs sur le maître ou sur une extension, une synchronisation croisée par exemple entre les moteurs du maître et une extension est impossible.
Remarque : Des appels de synchronisation se succédant rapidement, tels qu’ils sont possibles par une boucle (voir exemple), peuvent nuire à la synchronisation, voire l’empêcher complètement.
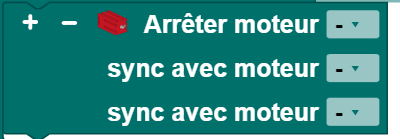
Arrêter
Le bloc Arrêt moteur … permet d’arrêter un moteur. Si vous voulez arrêter plusieurs moteurs en même temps, vous pouvez ajouter jusqu’à trois moteurs en plus à gauche du bloc.
Interroger
Le bloc a atteint sa position et est utilisé comme une condition pour atteindre sa position. Par position, on entend ici la position finale d’un moteur encodeur à pas complet.
Servomoteur
Configurer
Le bloc Définir la position sur ... permet de définir la position d'un servomoteur sur une valeur spécifique (de 0 à 512). 0 et 512 sont les valeurs de déviation maximale à droite et à gauche. Pour la valeur 256, le servomoteur est placé au centre.
Afficher
Le bloc Récupérer la positionpermet de consulter la position d'un servomoteur et de la traiter comme une valeur.