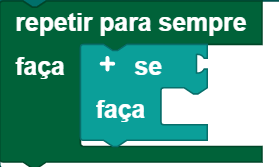
O início de cada bloco de tempo
O bloco de tempo oferece a possibilidade de executar um programa se uma condição for satisfeita. Portanto, ele funciona de maneira semelhante a uma distinção de caso, mas não é executado apenas uma vez, e sim sempre que a condição for atendida durante todo o curso do programa. O início de cada bloco de tempo:

É uma abreviatura para a seguinte construção:
Você pode configurar todas as condições da categoria motor em iniciar cada bloco de tempo a este nível.
Observação: A seção do programa dentro do iniciar de cada bloco de tempo deve ser mantida curta e não conter chamadas de bloqueio ou loops sem fim para que esta parte do programa possa ser processada rapidamente.
Motor
O símbolo nos blocos do motor representa todos os motores que não são codificadores ou servo motores.
Definir
Com o bloco definido a velocidade do motor para [] ..., você pode definir a velocidade de um motor para um determinado valor (de 0 a 512). A direção de rotação pode ser selecionada no menu suspenso (triângulo pequeno).
Lembrar
Com o bloco obter velocidade do motor, a velocidade de um motor pode ser acessada e posteriormente processada como um valor.
Consultar
Com os blocos motor em execução e a velocidade do motor está ... , você pode usar a atividade ou a velocidade de um motor como condição.
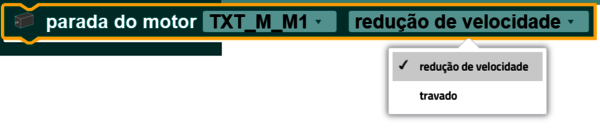
Parar
Com o bloco parar motor [], é possível parar um motor. O bloco parar motor [] oferece as opções de parar um motor diretamente ou por inércia. A opção desejada pode ser selecionada por meio do menu suspenso (triângulo pequeno):
Motor codificador

O motor codificador tem as mesmas funções de um motor normal, mas também oferece a opção de contar as rotações e controlar vários motores de maneira sincrônica. Uma revolução é dividida em ~64 etapas.
Definir
Com o bloco

você pode definir a velocidade de um motor para um determinado valor (de 0-512). A direção de rotação pode ser selecionada no menu suspenso (triângulo pequeno). Além disso, você pode inserir o número de etapas que o motor deve percorrer. Neste exemplo, o motor gira 100 etapas, ou seja, uma revolução e um terço. Como pode ser visto no exemplo, este bloco possui um sinal de mais, com a ajuda do qual vários motores podem ser controlados de maneira sincrônica. É possível sincronizar motores no mestre ou em uma extensão; a sincronização geral, por exemplo, entre os motores do mestre e uma extensão, não é possível.
Observação: Chamadas de sincronização em rápida sucessão, como aquelas possibilitadas por um loop (veja o exemplo), podem prejudicar a sincronicidade ou até mesmo causar sua perda completa.
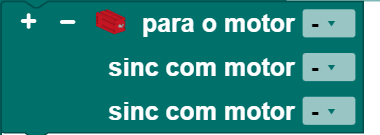
Parar
Com o bloco parar motor ... é possível para um motor. Caso queira parar vários motores ao mesmo tempo, poderá adicionar até três motores usando o botão de adição à esquerda do bloco.
Consultar
O bloco atingiu a posição é usado para usar a posição alcançada como uma condição. Aqui, posição significa a posição final de um motor codificador após o tamanho da etapa concluída.
Servo motor
Definir
Com o bloco Definir posição a ..., você pode definir a posição de um servo motor a um determinado valor (de 0 a 512). 0 e 512 são os valores para a deflexão máxima à direita e à esquerda. Com o valor 256, o servo motor está, correspondentemente, no meio.
Lembrar
A posição de um servo motor pode ser acessada com acessar posição e posteriormente processada como um valor.