Le démarrage de chaque bloc
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
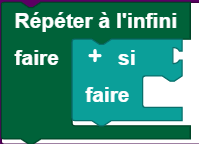
On peut insérer dans le démarrage chaque bloc de la catégorie I2C toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Capteur environnemental

Le capteur environnemental combine en un seul élément les quatre fonctions suivantes : capteur de qualité de l’air, capteur d’humidité de l’air, baromètre et thermomètre.
Capteur d’humidité de l’air
Afficher
Avec le bloc Récupérer l’humidité de l’air du capteur environnemental, on peut mesurer l’humidité de l’air.
Interroger
Pour savoir si l’on mesure une certaine température, le bloc Capteur environnemental humidité de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer l’humidité de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque l’humidité de l'air est supérieure à 10.

Capteur de la qualité de l'air
Afficher
Avec le bloc Récupérer la qualité de l’air du capteur environnemental comme [] , on peut mesurer la qualité de l’air. Le menu déroulant (petit triangle) permet de choisir si la qualité de l’air doit être restituée en tant que valeur numérique (de 0 à 500) ou en tant que texte.
Interroger
Pour savoir si l’on mesure une certaine qualité de l'air, le bloc Capteur environnemental qualité de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la qualité de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la qualité de l'air est supérieure à 10.

Baromètre
Afficher
Avec le bloc Récupérer la pression de l’air du capteur environnemental, on peut mesurer la pression de l’air.
Interroger
Pour savoir si l’on mesure une certaine pression de l'air, le bloc Capteur environnemental pression de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la pression de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la pression de l'air est supérieure à 10.

Thermomètre
Afficher
Avec le bloc Récupérer la température du capteur environnemental, on peut mesurer la pression de l’air.
Interroger
Pour savoir si l’on mesure une certaine température, le bloc Capteur environnemental température[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la température à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la température est supérieure à 10.

Capteur combiné

Le capteur combiné combine trois fonctions en un seul élément : le capteur d’accélération, le gyroscope et le capteur de compas.
Capteur d’accélération
Afficher
La fonction Récupérer l'accélération du capteur combiné dans [] permet d'obtenir l’accélération dans les directions. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). L’accélération est indiquée en g.
Interroger
Pour savoir si l’on mesure une certaine accélération, le bloc Capteur combinéAccélération dans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer l’accélération à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque l'accélération dans la direction x est supérieure à 10.

Capteur à compas
Afficher
La fonction Récupérer le flux magnétique du capteur combiné dans [] permet d'obtenir le flux magnétique dans une direction. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). Le flux magnétique est indiqué en μT.
Interroger
Pour savoir si l’on mesure un certain flux magnétique, le bloc Capteur combiné Flux magnétiquedans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer le flux magnétique à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque le flux magnétique dans la direction x est supérieure à 10.

Gyroscope
Afficher
La fonction Récupérer la rotation du capteur combiné dans [] permet d'obtenir la rotation dans une direction. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). La rotation est indiquée en °/s.
Interroger
Pour savoir si l’on mesure une certaine vitesse d'angle, le bloc Capteur combinéRotation dans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer la rotation à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la rotation dans la direction x est supérieure à 10.
